HyDrone: Intelligent Water Surface Robot for Water Sampling and Sanitation
- UM Research
- Jun 13, 2023
- 3 min read
Updated: Oct 31, 2023
The idea behind HyDrone initially came about in the year 2019. At that time, stakeholders such as National Hydraulic Research Institute of Malaysia (NAHRIM) as well as Suruhanjaya Perkhidmatan Air Negara (SPAN) were working towards addressing the problem of inland water pollution in the nation. There was much literature that served as a fundamental basis for this project, one of which brought up the declining state of Malaysian lakes and watersheds sanitation. Unfortunately, water pollution had been normalised in Malaysia, so much so that litter in bodies of water was such a common sight. Non compostable wastes such as plastic bottles, styrofoam containers, and even garbage in general are left floating in urban lakes - not to mention weighted wastes that have sunk to the bottom.
Although this was unfortunately treated as a norm, it was far from good or healthy for the marine life within the lakes, and the ecosystem in general. The question of how to improve water pollution came about, and brought numerous ideas to the discourse. One of them was prompted by the possibilities of the usage of robotics in trying to create awareness and improve lake sanitation efficiency. The spectrum of the discussion was attempting to address eutrophication, otherwise known as the algal bloom - a dire problem that has made 60% of Malaysian lakes eutrophic. As manually taking a boat to collect water samples were a tedious job, this elicited a question of if they can instead ‘outsource’ this task to a robot that would be able to perform water sampling at a faster pace and acquire the samples more efficiently and frequently.
With those goals in mind, several colleagues from the university came together in an attempt to gain funding to execute this research. This team consisted of learned individuals from various departments in UM, including Professor Amir Merican from Bioinformatics, Dr Sofian Abu Talip from Electrical Engineering, and Dr Zati Hakim Azizul Hasan from Artificial Intelligence. Led by Professor Amir Merican, the team, who were focused on addressing the 6th Sustainable Development Goal set forth by the United Nations (Clean Water and Sanitation) were granted the IIRG006-2019 Cycle 1 by the Ministry of Higher Education Malaysia through UM. Notably, this IIRG team is strongly supported by the project’s impact partner, the UM Water Warriors.
HyDrone, a subprogram of the IIRG, is the brainchild of Dr Zati. HyDrone is a fusion of IR4.0 drivers such as autonomous robots, artificial intelligence (AI) and the internet of things (IoT). It aims to come up with a technological solution in conserving the quality and sanitation of lakes to replace an otherwise manual process. As a water surface robot prototype, HyDrone is capable of maintaining buoyancy on the lake - enabling it to capture garbage such as plastic bottles and foam containers, and simultaneously collect water samples. With consultation from the UM Water Warriors, the Research and Development (R&D) team, led by Dr Zati, were able to propose the optimol robot design (see Figure 1).

Figure 1: The HyDrone with a camera, water containers, nets, propellers and sensors.
The R&D process began with the structural design, power supply and circuit management. Considering the difficulty or challenge for the prototype to maintain buoyancy, the structure has to be well balanced enough to support the load in order for the robot to float. At the same time, wireless networking is needed to enable the team to control the robot remotely. A user can log in to the robot using a specific pin code via VPN. Figure 2 shows HyDrone driven remotely via mobile device.

Figure 2: Mr Affan Nasaruddin from UM Water Warriors controlling HyDrone forward, backward, and making left and right turns. Field testing carried out at UM Varsity Lake.
Equipped with a camera, the robot captures a live video feed from HyDrone and sends it over to the cloud for advanced computation. An AI algorithm is trained to classify plastic waste, foam containers and dry leaves (see Figure 3). The user can view the AI in action on their mobile device, and follow the tracking line to pick up the garbage (see Figure 4).

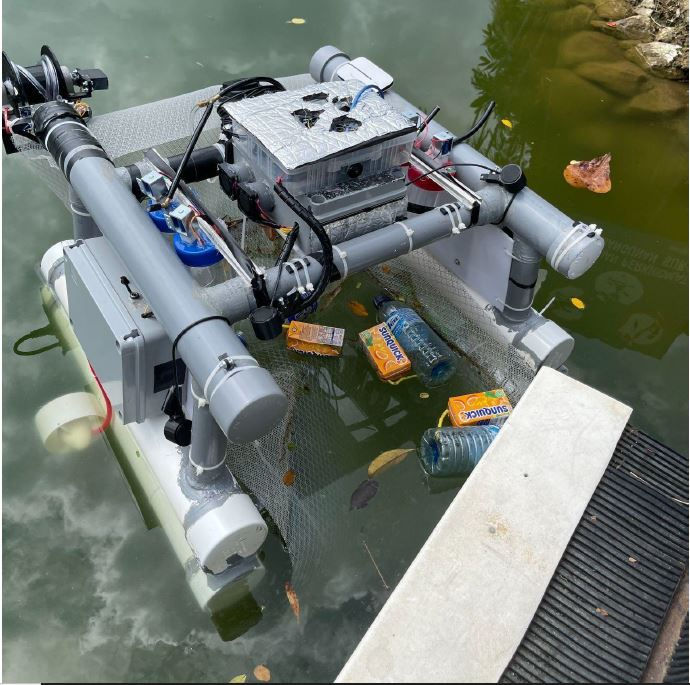
Figure 4: Trash captured and trapped using nets
The HyDrone water containers have their own programmable pumps and sensors for collection at separate intervals. It was crucial the tubing used avoids water flowing through the valves so the water remains untouched (see Figure 5).

Figure 5: HyDrone sampling mechanism collects water into 4 x 250ml containers
The HyDrone project has produced 3 undergraduate final year projects and 2 masters dissertations. Credit goes to Ahmed Abdullah Omar, Palok Biswas, Aliff Zainuddin, Aqiff Mursyiddeen and Ng Hao Siong for their great work. Moving forward, Dr Zati and the UM Water Warriors are planning a HyDrone-to-community program, to explore the full potential of citizen science for water conservation activities.
Researcher featured:
Dr. Zati Hakim Azizul Hasan
Principal Invetigator, IIRG006A-2019 Cycle 1
Department of Artificial Intelligence
Faculty of Computer Science and Information Technology
zati@um.edu.my, https://umexpert.um.edu.my/zati.html
Author: Najla Mohd Bustaman (nmb.najla@gmail.com)
Comments